Architetture con servo sistemi decentralizzati

L'ESPERTO RISPONDE Luca Stanzani (Packaging and Processing Bosch Rexroth Italia) risponde ai quesiti posti dai lettori, circa le problematiche tecnologiche e di mercato relative all’automazione. Dalla rubrica pubblicata su ItaliaImballaggio di giugno 2013.
Domanda
Sono il titolare di una piccola-media azienda che costruisce macchine per il packaging secondario, e vedrei con interesse la possibilità di “migrare” verso servomotori con azionamento integrato. Ho però grossi dubbi, dato che il direttore tecnico continua a ripetermi che si tratta solo di una moda passeggera e che ci sono grossi limiti in termini di durata. Che cosa ne pensa? A.C.
Perplessità come quelle del suo direttore tecnico sono ancora frequenti, anche se statisticamente notiamo una sempre più massiccia conversione ad architetture decentralizzate.
Le mode durano una stagione o poco più, qui stiamo invece parlando di un fenomeno che, a partire dal 2007 quando Rexroth presentò gli IndraDrive Mi (i primi motori con azionamento integrato). L’utilizzo di questi sistemi si è incrementato moltissimo, e il fenomeno ha spinto parecchi produttori di servosistemi a integrare una soluzione decentralizzata al proprio portafoglio prodotti.
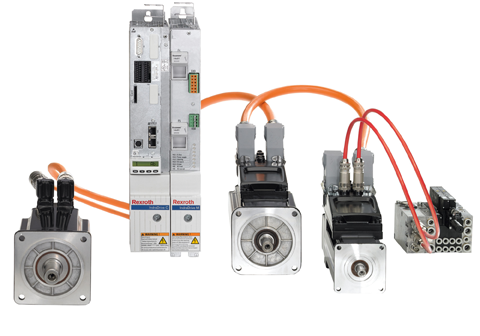
Ma che cosa sono in effetti i motori con azionamento integrato? Il concetto si basa sull’eliminazione dal quadro elettrico del servoazionamento, decentralizzandolo in macchina e integrandolo direttamente al servomotore. All’interno del quadro elettrico risiede solo l’alimentatore, da cui parte un unico cavo idrido, cioè un unico cavo che contiene al proprio interno tutti i segnali necessari (o in altri casi 2 cavi, poiché il bus di campo viene cablato singolarmente). Tutti i motori sono poi collegati utilizzando il concetto di “daisy chain”, cioè “entra-esci” (oppure in altri casi attraverso ciabatte di derivazione).
Per rispondere alla sua richiesta, possiamo spiegare quali sono i reali vantaggi del sistema e vedere quali possono essere i suoi limiti.
 I vantaggi legati a un’architettura decentralizzata si possono sintetizzare prevalentemente in costi, semplificazione degli impianti, riduzione dei tempi di installazione e di service, aumento della modularizzazione delle macchine e risparmi energetici.
I vantaggi legati a un’architettura decentralizzata si possono sintetizzare prevalentemente in costi, semplificazione degli impianti, riduzione dei tempi di installazione e di service, aumento della modularizzazione delle macchine e risparmi energetici.
Decentralizzare i drive in campo determina una riduzione del quadro elettrico, con la conseguente possibilità di standardizzare i quadri in maniera indipendente. L’architettura “daisy chain” garantisce una riduzione nei tempi di cablaggio e di metri lineari di cavi. Infine ricopre un ruolo importante l’aumento dell’efficienza energetica, grazie allo scambio e al bilanciamento energetico, che avviane tra i vari assi attraverso lo scambio via Dc-bus, e all’eliminazione dei consumi del condizionatore (spesso di diversi Kw).
Le limitazioni più evidenti di queste tecnologie riguardano, invece, le potenze (a oggi si arriva con coppie continuative non superiori ai 12 -15 Nm), la corrente continuativa e massima sul cavo ibrido ed evidenti limiti in caso di applicazioni in ambienti esplosivi (Atex).
Facendo riferimento all’esperienza maturata in 6 anni di dati e applicazioni eseguite a partire dall’introduzione degli IndraDrive Mi di Rexroth, possiamo garantire le prestazioni, la qualità e la stabilità dei sistemi.
Nel dettaglio, vediamo come l’indice di rottura è allineato a qualsiasi altro nostro azionamento, le prestazioni sono assolutamente identiche come pure anche le opzioni e le features.
Con la nuova generazione di IndraDrive Mi e le equivalenti versioni Near drive, è possibile beneficiare di interfacce di comunicazione multiprotocollo (Sercos III, EtherNet/IP, PROFINET IO, EtherCat), drive intelligenti con sincronismo e interpolazione sul drive, possibilità di abilitazione di un PLC integrato per funzioni di motion e logica ( Co.De.Sys 3).
In termini di sicurezza, sono disponibili funzioni STO (SIL 3, Cat. 4 PL e ), e safe motion via safety Bus, come pure la possibilità di definire aree sicure. Infine, oltre ad avere 4 ingressi/uscite digitali (di cui 2 probe) a bordo, nell’ottica della modularità e della espandibilità, è anche possibile collegare direttamente al drive dispositivi esterni quali IO’s, dispositivi pneumatici e/o idraulici, attraverso un’ulteriore interfaccia di comunicazione multiprotocollo.
Come possiamo notare l’architettura decentralizzata è in continua evoluzione e Rexroth sta già lavorando a ulteriori sviluppi sempre più orientati all’espandibilità del sistema. Oggi riteniamo, quindi, che i servosistemi decentralizzati possano rappresentare una risposta e un’alternativa interessante, e in molti casi anche strategica per molti impianti.
Per avere un parere dall’esperto Bosch Rexroth, invia le tue richieste a [email protected]
For further information www.boschrexroth.it