Robot & sistemi di visione
UNA COPPIA VINCENTE Nei sistemi biologici come in quelli artificiali la vista è il senso più complesso ma è anche quello che assicura enormi vantaggi. È, dunque, per un’ottima ragione che il cervello consuma molta energia per elaborare gli stimoli visivi, impegnando un buon 60% della corteccia cerebrale… Abdelmalek Nasraoui*
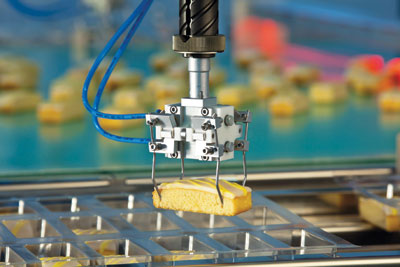 Semplicissimo eppure complesso. Prima che il robot della foto potesse prelevare il pezzo di torta, è stato necessario mettere a punto una serie di processi molto articolati. Anzitutto, il prodotto deve entrare nel campo d’azione del sensore che registra l’immagine, che in questo caso è costituito da uno scanner a luce riflessa della Schubert: mentre i prodotti avanzano in continuo su un nastro, il sistema di visione riprende le linee delle immagini singole coordinate di pixel che vengono poi riassemblate dal software formando l’immagine a colori dei singoli oggetti.
Semplicissimo eppure complesso. Prima che il robot della foto potesse prelevare il pezzo di torta, è stato necessario mettere a punto una serie di processi molto articolati. Anzitutto, il prodotto deve entrare nel campo d’azione del sensore che registra l’immagine, che in questo caso è costituito da uno scanner a luce riflessa della Schubert: mentre i prodotti avanzano in continuo su un nastro, il sistema di visione riprende le linee delle immagini singole coordinate di pixel che vengono poi riassemblate dal software formando l’immagine a colori dei singoli oggetti.
Il prodotto, dunque, ora può essere analizzato. A seconda del programma, appositi algoritmi definiscono, per esempio, tipologia, posizione, orientamento e altre sue caratteristiche specifiche; sulla base di questi risultati vengono trasmessi al robot i segnali di consenso al prelievo.
Nel caso della fetta di torta della foto, sono stati implementati ulteriori algoritmi per il controllo della qualità, ovvero la verifica che la crema bianca sia stata spalmata uniformemente, la quantità e la qualità delle strisce di cioccolato sia conforme agli obiettivi e, più in generale, che il prodotto sia in perfetto stato. Ciascuna di queste operazioni deve essere “descritta” tramite funzioni basate, di norma, su principi di matematica numerica e statistica.
Insomma, mentre persino un bambino sa immediatamente qual è il pezzo di torta “migliore”, le macchine devono eseguire lunghi calcoli per arrivare a scegliere quello giusto. Le innumerevoli applicazioni oggi disponibili sono diventate realtà solo quando macchine intelligenti, fornite di sistemi robotizzati e visivi flessibili, hanno acquisito la capacità di sequenza “vedere, decidere, agire”. Un traguardo che in Schubert è stato raggiunto sin all’inizio degli anni Ottanta.
Flessibilità e modularità
Anche nel riconoscimento bidimensionale degli oggetti non esistono principi generali, validi per qualsiasi prodotto, che stabiliscano come debba essere manipolato dal robot di confezionamento. Nella stessa applicazione possiamo, infatti, trovare prodotti di consistenza diversa, differenti materiali per il packaging e altro ancora. Anche in questo caso, comunque, bisogna avere la certezza che la superficie di ogni singolo prodotto sia visibile nella sua interezza, perché solo così sarà possibile garantirne la localizzazione esatta e il controllo qualità. Non solo: per garantirsi una produzione perfetta bisogna necessariamente agire nelle prime fasi dello sviluppo della linea di confezionamento, concependo in dettaglio anche la soluzione da impiegare per il riconoscimento dell’oggetto. La scelta dei nastri trasportatori, che fanno da sfondo all’immagine, il tipo e il colore dell’illuminazione, nonché i sensori di colore o lo spazio colori da utilizzare risultano, infatti, decisivi per l’affidabilità dell’impianto.
Questa estrema flessibilità dell’apparato di visione si ottiene solo adottando una configurazione modulare degli elementi che permettono di adeguare di volta in volta il sistema in funzione dell’applicazione. Gli scanner a tecnologia Schubert sono una delle componenti cruciali di questo sistema, permettendo, sin dall’inizio della progettazione, la maggiore libertà nello sviluppo di nuove idee di marketing e di nuovi prodotti.
Anche a livello di software Schubert ha sposato una filosofia modulare. La parola d’ordine, in questo caso, è stata la facilità d’uso, che richiede, a monte, una struttura chiara e trasparente e si riflette nella grafica, nelle schermate e nell’utilizzo dei parametri in gioco. L’impegno profuso fin qui, infatti, sarebbe inutile se gli addetti alla produzione non fossero in grado di gestire il sistema. Se, dunque, la complessità che sottende la soluzione nel suo insieme non deve emergere, l’operatore deve però poter controllare tutte le funzioni: il riconoscimento delle immagini messo a punto in Schubert si basa su software concepiti seguendo questi criteri.
Il futuro è 3D
Nonostante la tecnologia dei computer sia molto avanzata, restano ancora problemi da risolvere. L’analisi della consistenza di un alimento, ad esempio, o la valutazione qualitativa della sua superficie rappresentano ancora delle sfide impegnative. In alcuni casi è necessario un impegno supplementare per effettuare il monitoraggio e la verifica di una caratteristica importante, e questa nuova esigenza comporta l’aggiunta di componenti hardware e di moduli software speciali, di complessi dispositivi di illuminazione o altro ancora. Il problema è che più componenti, in genere complessi e spesso customizzati, possono rendere il sistema meno user friendly e più difficile da gestire oltre, inevitabilmente, a contravvenire al principio di modularità. Le soluzioni più semplici restano dunque sempre le migliori, e sono il vero obiettivo.
Oggi, in ambito produttivo, siamo prossimi a poter impiegare su larga scala immagini tridimensionali. Le tecnologie di triangolazione e di visione stereoscopica sono entrambe molto promettenti e, grazie ai numerosi vantaggi offerti dall’elaborazione stereo delle immagini nella progettazione di sistemi, nell’handling e nelle loro sempre più numerose applicazioni, troveranno presto applicazione pratica. E spesso sono le soluzioni personalizzate a condurre al prodotto innovativo. Come è accaduto con lo scanner bidimensionale della Schubert -2D. E come accadrà per lo scanner tridimensionale Schubert -3D.
Dr. Abdelmalek Nasraoui
Direttore ricerca e sviluppo dei sistemi di visione, Gerhard Schubert GmbH