Le potenzialità di XTS
Grazie a EtherCAT (l'Industrial Ethernet più veloce oggi disponibile) Beckhoff ha sviluppato e realizzato la nuova tecnologia di azionamento eXtended Transport System: un’altra pietra miliare posta in essere da chi è abituato ad anticipare il futuro.
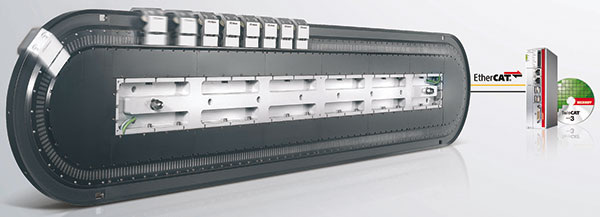 XTS di Beckhoff è un sistema di azionamento meccatronico e “all in one”, che unisce i vantaggi di due principi di azionamento standard: i sistemi rotativi e lineari. |
 Alimentazione: collegamento interno, moduli di alimentazione ed EtherCAT. |
Il sistema di azionamento XTS (eXtended Transport System) di Beckhoff offre potenzialità totalmente inedite. Unisce i vantaggi di due principi di azionamento standard: i sistemi rotativi e lineari. Il motore è completamente integrato in un'unica unità, insieme all’elettronica di potenza e all’interfaccia di rilevamento della posizione. Uno o più "mover" senza fili possono muoversi su una configurazione di percorso pressoché libera e flessibile in modo altamente dinamico, fino a una velocità di 4 m/s.
In questo modo XTS rivoluziona il motion control in forma costruttiva e compatta, consentendo di progettare concetti di macchine del tutto innovativi.
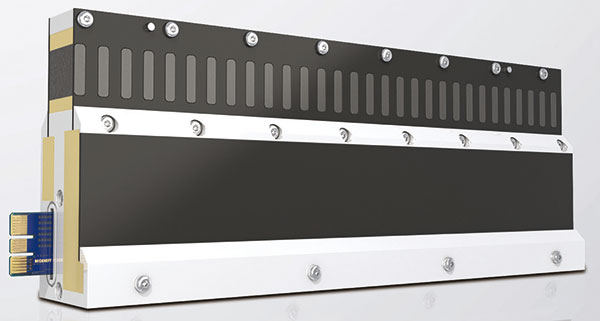
XTS è un sistema meccatronico che dispone di tutto ciò che è necessario per il funzionamento: un motore lineare modulare completamente integrato con elettronica di potenza e sensore di movimento in un unico apparecchio; uno o più mover, una guida meccanica; un PC industriale con software di controllo TwinCAT.
Una sfida tecnologica. La particolarità dell'XTS risiede nel fatto che i loop di controllo dell’azionamento non possono essere chiusi localmente nei moduli distribuiti, perché i mover si spostano grazie a bobine e solenoidi sequenziali.
Gli amplificatori nei moduli controllano diverse bobine e solenoidi e devono gestire un numero di mover in continuo cambiamento. Dato che le proprietà dinamiche dei mover devono essere portate oltre i confini del singolo modulo, il controllo deve avvenire centralmente, in modo da spostare le unità da un modulo al successivo con una certa regolarità e fluidità del movimento.
La soluzione XTS è caratterizzata da un discreto numero di sensori di posizione e bobine. Ogni 30 mm vi è un sensore di movimento che, come le bobine, viene interrogato in un ciclo esatto di 250 μs. Dato il conseguente aumento di lavoro del sistema di comunicazione, ogni 3 metri di lunghezza dell’XTS è necessario trasportare circa 80 Mbit/s di dati di processo senza jitter da/verso i moduli distribuiti. È quindi necessario sincronizzare con elevata precisione questi dispositivi, su lunghe distanze e su più segmenti EtherCAT.
Elaborazione dinamica dei dati ad altissima velocità. EtherCAT risponde appieno a queste esigenze grazie alla possibilità di poter eseguire le cosiddette “elaborazione al volo”. Una modalità operativa in cui ogni dispositivo della rete preleva o scrive i dati che gli sono destinati dai frame dati comuni senza prima ricevere, elaborare e spedire nuovamente i frame, come avviene negli altri protocolli.
I frame sono elaborati nei controllori slave EtherCAT durante il trasferimento, praticamente senza alcun ritardo. In particolare, in questo modo il data rate di rete utilizzabile di EtherCAT supera il 95% del bit rate, perché l’overhead dei frame Ethernet non si manifesta per dispositivo e direzione, ma solo una volta ogni circa 1500 byte di dati di processo, che possono essere distribuiti a qualsiasi numero di dispositivi. Gli 80 Mbit/s richiesti sono quindi superati, anche con Ethernet a 100 Mbit/s. Un ulteriore vantaggio è generato dalla possibilità di utilizzare lo stesso frame per i dati d’ingresso e d’uscita e dall’ampiezza di banda disponibile nel modo full duplex. In altri termini, una banda di 100 Mbit/s lordi diventa essenzialmente di 200 Mbit/s. I controllori slave EtherCAT elaborano i frame in hardware e quindi rendono disponibili i dati di processo all’applicazione locale immediatamente dopo che i frame li hanno attraversati: per il protocollo EtherCAT, i tempi ciclo dello stack di protocollo sono irrilevanti. Inoltre, i clock a elevata precisione nei controllori slave sono sincronizzati con precisione e generano un clock di sistema comune la cui precisione è indipendente dal jitter di invio dei frame del master. In questo modo EtherCAT raggiunge una precisione della sincronizzazione sui dispositivi distribuiti dell’ordine delle due cifre in termini di nanosecondi, rendendo assolutamente inutile l’utilizzo di hardware speciale nell’unità master.
Poiché i frame sono trasferiti senza influenza del software nel chip, EtherCAT offre un ritardo passante minimo e costante. Ciò significa che il ritardo può essere facilmente eliminato agendo matematicamente durante la sincronizzazione dei clock distribuiti nei dispositivi.
Infine va ricordato che, dal punto di vista fisico, EtherCAT è sempre un collegamento punto a punto e ogni influenza EMC scompare sul dispositivo successivo. Nonostante l’elevato data rate, si tratta quindi un protocollo insolitamente robusto. Nell’evento - improbabile - che un guasto porti a un bit di errore, i controlli CRC ne permettono l’affidabile individuazione e localizzazione.
I controllori slave EtherCAT offrono fino a 4 porte EtherCAT, il che significa che viene supportata ogni combinazione di topologie, senza la necessità di componenti di infrastruttura attivi come switch o hub. EtherCAT ha requisiti hardware minimi nel master: una porta Ethernet standard è sufficiente e non sono richiesti chip bus o coprocessori di comunicazione.
L’XTS è un chiaro esempio di come un approccio di sistema basato su EtherCAT sarebbe stato impensabile con sistemi bus convenzionali.